实验报告
概述
- 第一阶段:基于Alpha-Beta剪枝算法
- 第二阶段:基于AlphaZero,尝试简单复现
基于 Alpha-Beta 剪枝的传统算法实现
1.1 环境
- 语言:Python3
- 库:Pygame
1.2 算法概述
1.2.1 基于极大极小值算法(Minimax)
核心思想是构建博弈树,假设双方均采用最优策略:MAX层(己方)总是选择能使局面评分最大的走法,而 MIN层(对方)总是选择能使局面评分最小的走法。
博弈树的数值是针对己方而言的,因此在评分函数中己方取正值,对手取负值。
搜索四步以后所有情况:
最后更新得到分数最优走法
1.2.2 Alpha-Beta 剪枝优化
为了解决 Minimax 算法在搜索深度增加时计算量呈指数级爆炸的问题,引入 Alpha-Beta 剪枝。该算法维护两个极值边界:
- Alpha(α):MAX 节点当前搜索到的最佳选择(下界)。
- Beta(β):MIN 节点当前搜索到的最佳选择(上界)。
剪枝逻辑:
- α 剪枝:在 MIN 节点,若发现某分支的值 ,则该节点及其后续分支无需继续搜索(MAX 层不会选择进入该 MIN 节点)。
- β 剪枝:在 MAX 节点,若发现某分支的值 ,则该节点及其后续分支无需继续搜索(MIN 层不会允许该局面出现)。
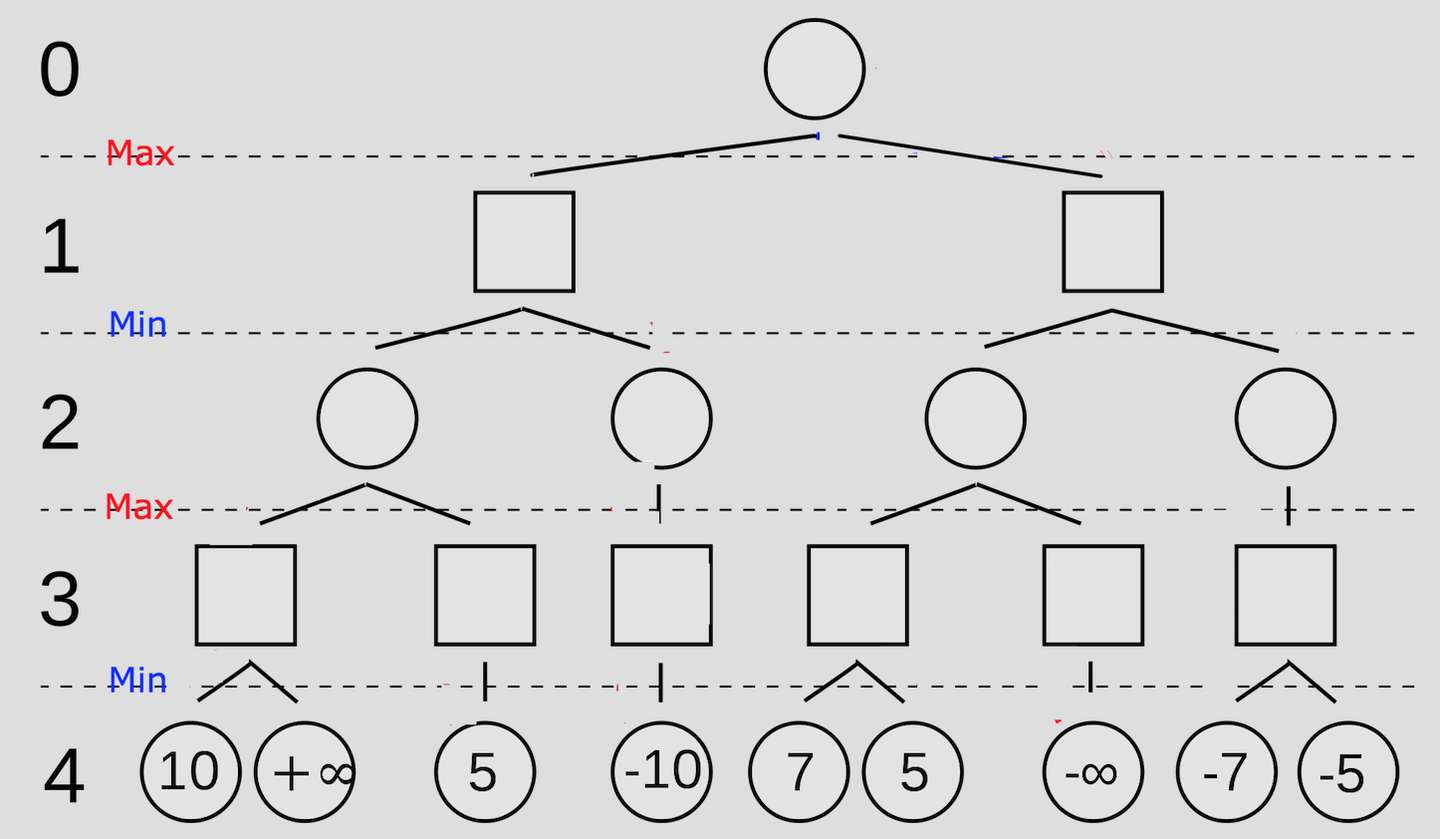
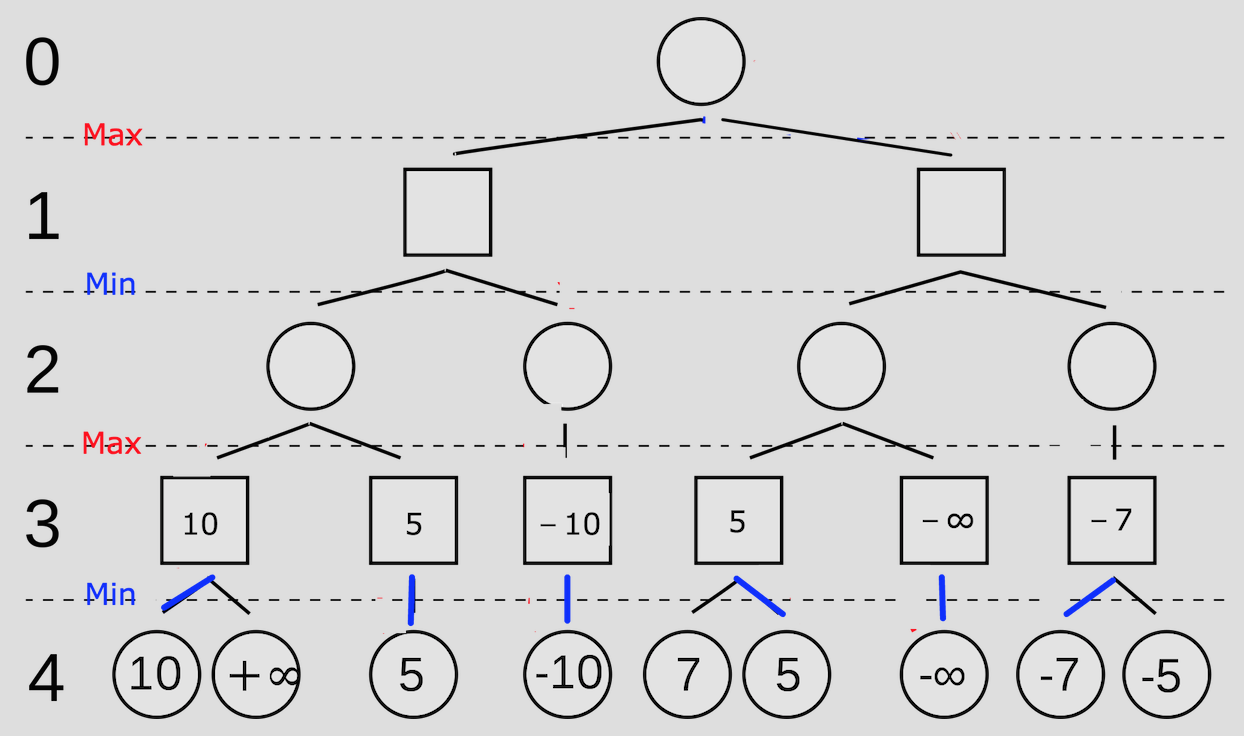
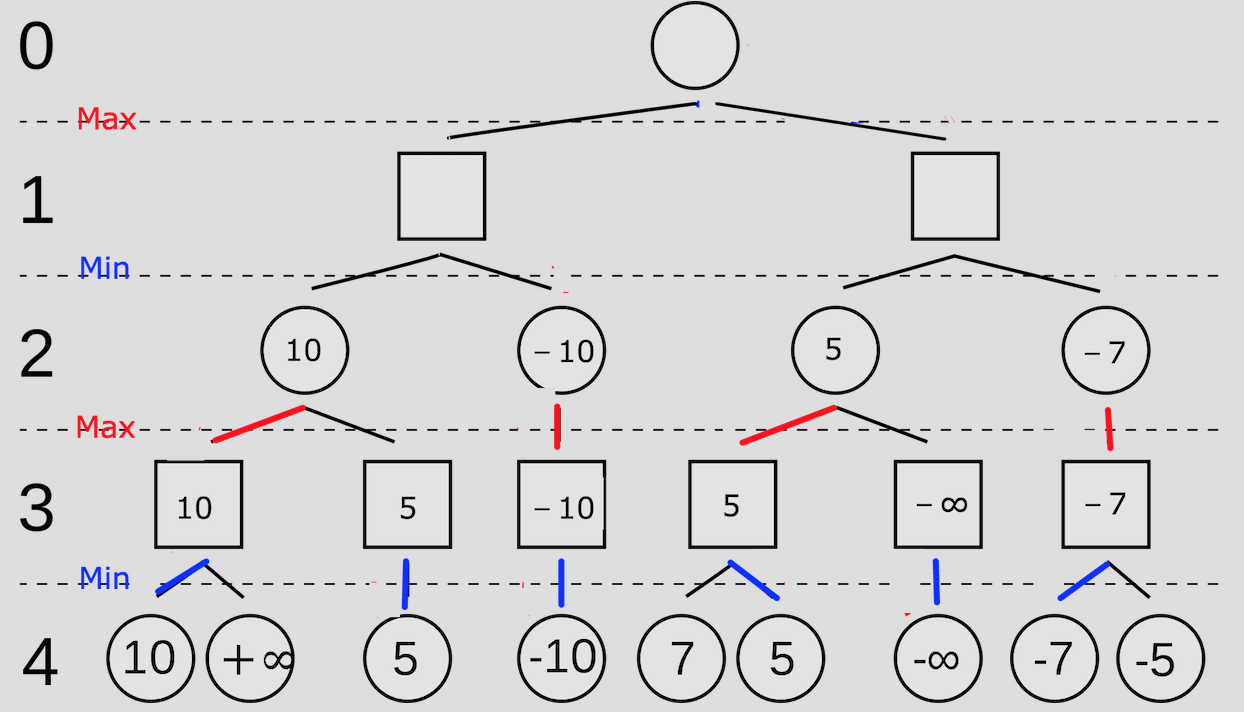
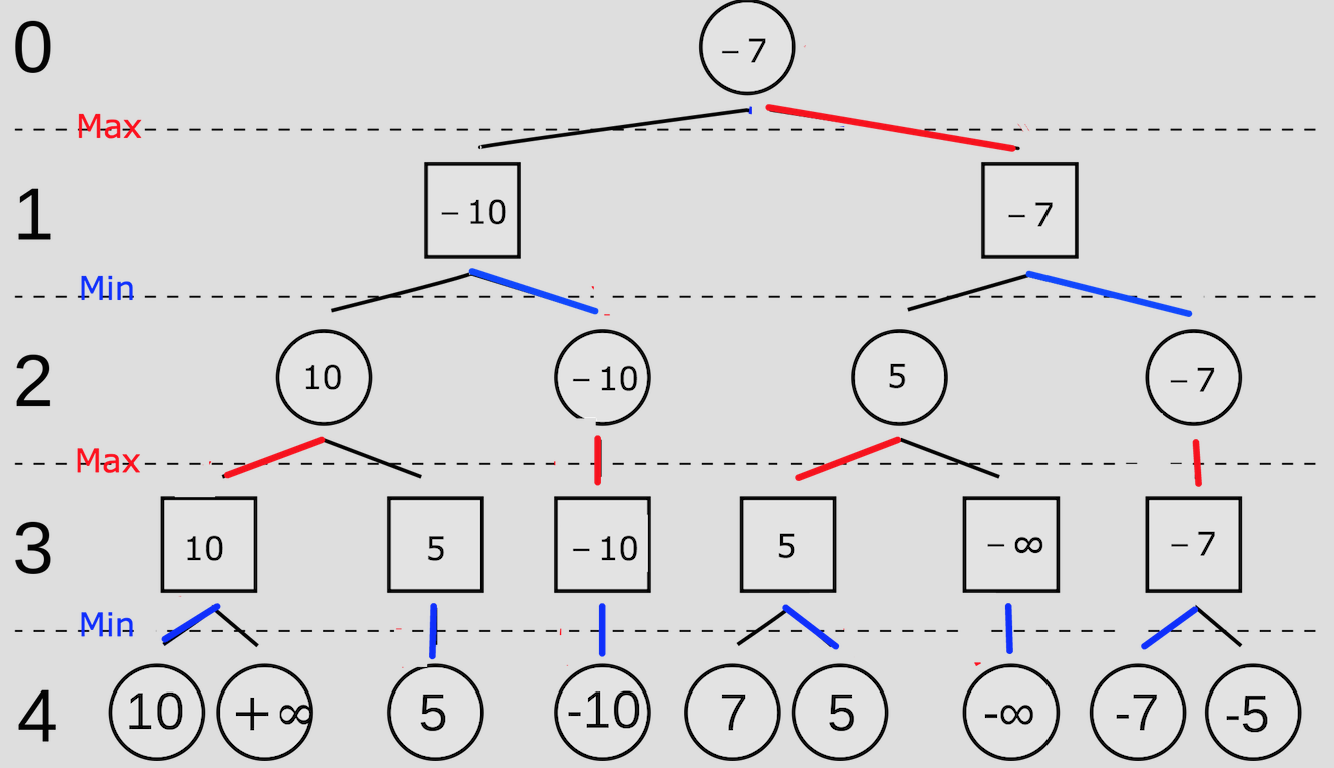
例如下图
圆形代表己方,方形代表对手
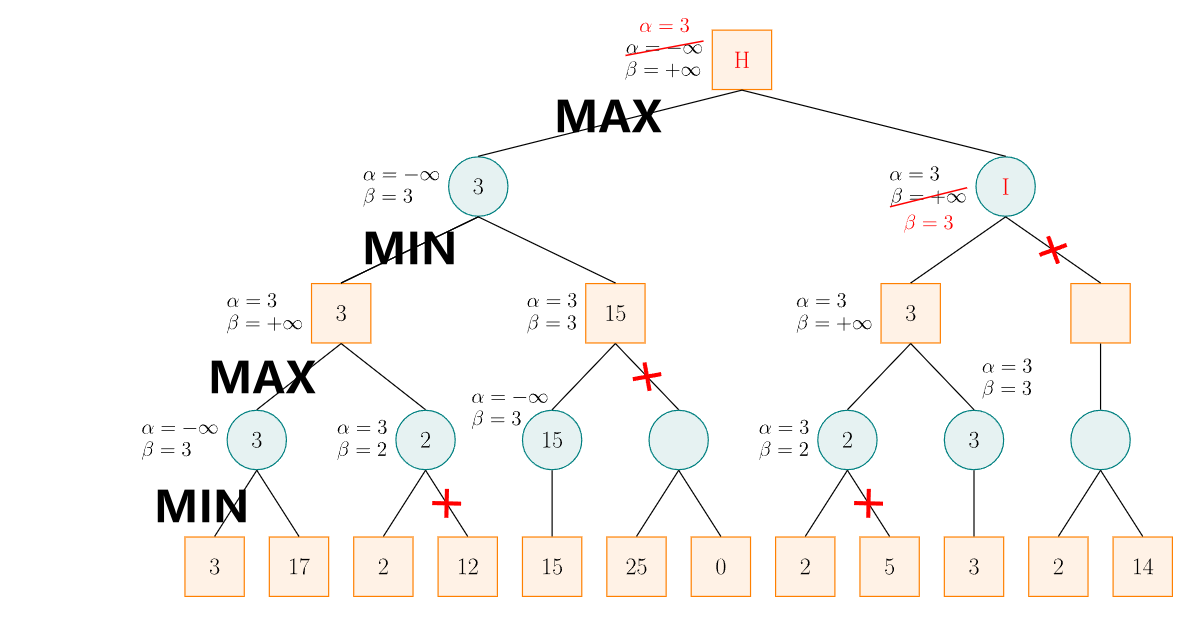
从左向右:
第一次剪枝是因为在 MIN 节点发现当前分支通过子节点更新的值小于父节点传下来的 ,因此父节点一定不会选择这个子节点。
第二次剪枝是因为在 MAX 节点发现当前分支通过子节点更新的值大于父节点传下来的 ,因此父节点一定不会选择这个子节点。
同理第三次和第四次
1.3 实验实现与分析
1.3.0 数据结构
使用二维数组
BOARD_SIZE = 15
# ...
board = [[EMPTY for _ in range(BOARD_SIZE)] for _ in range(BOARD_SIZE)]
EMPTY(0): 空位BLACK_STONE(1): 黑子WHITE_STONE(2): 白子
使用 board[row][col] 的形式访问
1.3.1 核心搜索算法实现
代码逻辑如下:
def minimax(board, depth, alpha, beta, maximizing_player, current_player, original_player):
# 递归终止条件:达到指定深度或游戏结束
if depth == 0:
return evaluate(board, original_player)
possible_moves = get_possible_moves(board)
if not possible_moves:
return evaluate(board, original_player)
opponent = BLACK_STONE if current_player == WHITE_STONE else WHITE_STONE
if maximizing_player:
max_eval = -float('inf')
for move in possible_moves:
i, j = move
board[i][j] = current_player
# 递归调用
eval_score = minimax(board, depth - 1, alpha, beta, False, opponent, original_player)
board[i][j] = EMPTY # 回溯状态
max_eval = max(max_eval, eval_score)
alpha = max(alpha, eval_score)
# 执行 β 剪枝
if beta <= alpha:
break
return max_eval
else:
min_eval = float('inf')
for move in possible_moves:
i, j = move
board[i][j] = current_player
eval_score = minimax(board, depth - 1, alpha, beta, True, opponent, original_player)
board[i][j] = EMPTY # 回溯状态
min_eval = min(min_eval, eval_score)
beta = min(beta, eval_score)
# 执行 α 剪枝
if beta <= alpha:
break
return min_eval
1.3.2 评估函数
将棋盘局势转化为数值,决定决策质量。
1.3.2.1 基于人工特征权重的设计
基于规则的评分系统,通过识别特定的棋型(如连五、活四、冲四等)并赋予相应权重来计算局势分。
def evaluate(board, player):
# 棋型权重常量定义
W_FIVE = 100000 # 连五:必胜
W_FOUR_OPEN = 10000 # 活四:极高威胁
W_FOUR_HALF = 2500 # 冲四
W_THREE_OPEN = 1500 # 活三
# ... 其他权重及位置评分
# 综合计算当前玩家得分 - 对手得分
1.3.2.2 不足
- 需要穷举所有可能的棋型组合
- 权重的微小调整会导致 AI 行为的剧烈变化(如过于激进或过于保守),且难以通过手动调参找到全局最优解。
- 该方法本质上是专家系统,其能力上限受限于设计者的五子棋水平,无法应对未预设的复杂局面。
1.3 第一阶段总结
1.3.1 实验成果
- 成功实现了基于 Alpha-Beta 剪枝的博弈树搜索算法。
- 构建了基础的棋型评估系统,AI 具备了初级的攻防能力。
1.3.2 局限
传统方法的局限性在于其非学习性。AI 无法从失败中总结经验,也无法根据对手的风格动态调整策略。这种依赖人工先验知识的方法并不符合我们对“智能”的定义。
基于 AlphaZero 的深度强化学习实现
2.0 环境
- 语言:Python 3
- 库:PyTorch, NumPy, Pygame
2.1 概述
依赖人工先验知识的方法并不符合我们对“智能”的定义,因此第二阶段尝试简单复现 AlphaZero 算法。该算法不使用人工估值函数,转而采用 CNN 来同时预测落子概率和局面价值,并通过自我对弈产生的数据进行强化学习训练。
2.2 核心算法架构设计
注:本部分代码逻辑参考了 AlphaZero 的开源实现
说明:
由于硬件限制,将棋盘改为9x9,并且极大简化了神经网络设计
2.2.1 策略-价值网络
网络采用双头架构,共享底部的卷积层特征,提取棋盘的空间特征。
class Net(nn.Module):
"""策略-价值网络模块"""
def __init__(self, board_width, board_height):
super(Net, self).__init__()
# 公共骨干网络:特征提取
# 输入维度:4 (特征平面) x 宽 x 高
self.conv1 = nn.Conv2d(4, 32, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1)
self.conv3 = nn.Conv2d(64, 128, kernel_size=3, padding=1)
# 策略头:输出动作概率分布
self.act_conv1 = nn.Conv2d(128, 4, kernel_size=1)
self.act_fc1 = nn.Linear(4*board_width*board_height,
board_width*board_height)
# 价值头:输出当前局面胜率评估 [-1, 1]
self.val_conv1 = nn.Conv2d(128, 2, kernel_size=1)
self.val_fc1 = nn.Linear(2*board_width*board_height, 64)
self.val_fc2 = nn.Linear(64, 1)
输入特征设计:采用 4 个二值化平面描述状态:
- 当前玩家棋子分布
- 对手棋子分布
- 上一步落子位置(提供历史时序信息)
- 当前执子方标识(1 为先手,0 为后手)
2.2.2 蒙特卡洛树搜索(MCTS)
MCTS 是 AlphaZero 的决策引擎,它使用神经网络的输出来引导搜索方向。 每个节点存储四个关键统计量:
- :访问次数
- :平均动作价值
- :置信上界(探索项)
- :先验概率(来自神经网络)
搜索流程:
-
选择:依据 UCB 公式选择子节点,平衡“利用”(高 Q 值)与“探索”(高 P 值低 N 值)。
-
扩展:到达叶节点后,调用神经网络计算 ,初始化所有合法动作的子节点。
-
评估:利用网络输出的 value 作为当前局面的评估值(不再进行随机模拟 Rollout)。
-
回溯:将评估值 沿搜索路径反向传播,更新父节点的 和 。
节点最后的值为
2.2.3 自我对弈与数据生成
./AlphaZero简单复现/mcts_alphaZero.py
关键策略:
- 探索噪声:在根节点添加 Dirichlet 噪声,防止自我对弈陷入单一策略的局部最优。
2.3 训练
2.3.1 损失函数设计
训练目标是最小化联合损失函数:
def train_step(self, state_batch, mcts_probs, winner_batch, lr):
# 1. 价值损失:网络预测值 v 逼近真实结果 z
value_loss = F.mse_loss(value.view(-1), winner_batch)
# 2. 策略损失:网络输出 p 逼近 MCTS 搜索概率 π
policy_loss = -torch.mean(torch.sum(mcts_probs * log_act_probs, 1))
# 3. 总损失
loss = value_loss + policy_loss
# 反向传播更新参数...
- MCTS 利用神经网络提供的先验概率 进行搜索,产生更强的策略 。
- 神经网络反过来以 为目标进行训练,从而获得更准确的 。
2.3.2 训练流程控制
def run(self):
for i in range(self.game_batch_num):
# 1. 收集自我对弈数据
self.collect_selfplay_data(self.play_batch_size)
# 2. 策略更新 (Experience Replay)
if len(self.data_buffer) > self.batch_size:
loss, entropy = self.policy_update()
# 3. 模型评估与保存
if (i+1) % self.check_freq == 0:
# 让当前模型与纯 MCTS (基准) 对战
win_ratio = self.policy_evaluate()
# 仅在胜率提升时保存为最佳模型
if win_ratio > self.best_win_ratio:
self.best_win_ratio = win_ratio
self.policy_value_net.save_model('./best_policy.model')
自适应学习率策略:
引入了基于 KL 散度的动态调整机制。如果新旧策略差异过大(KL 值高),说明步长过大,需降低学习率;反之则增加学习率。这保证了策略更新的稳定性。
调整评测
在胜率为100%时增加纯MCTS迭代次数
if (self.best_win_ratio == 1.0 and
self.pure_mcts_playout_num < 5000):
self.pure_mcts_playout_num += 1000
self.best_win_ratio = 0.0
超参数
# 训练参数
self.learn_rate = 2e-3
self.lr_multiplier = 1.0 # 根据 KL 散度自适应调整学习率
self.temp = 1.0 # 温度参数
self.n_playout = 400 # 每次落子的模拟次数
self.c_puct = 5
self.buffer_size = 10000
self.batch_size = 512 # 训练的 mini-batch 大小
self.data_buffer = deque(maxlen=self.buffer_size)
self.play_batch_size = 1
self.epochs = 5 # 每次更新的训练步数
self.kl_targ = 0.02
self.check_freq = 50 # 每多少次对局检查一次性能
self.game_batch_num = 1500 # 总训练对局数
self.best_win_ratio = 0.0
# 纯 MCTS 的模拟次数,作为评估基准
self.pure_mcts_playout_num = 1000
在单张 NVIDIA GTX 1650 Laptop 上训练
训练日志见./AlphaZero简单复现/training_log_20251217_232437.log
2.4 第二阶段总结
2.4.1 实验成果
- 成功简化实现了 AlphaZero 的基本算法
- 该算法体现不依赖先验知识,通过自我对弈强化学习展现出的学习性,对于任何棋类游戏的泛化性
- 仅半天的训练时间在单张 NVIDIA GTX 1650 Laptop 实现了对4000次 MCTS 70% 左右的胜率
2.4.2 局限
在AlphaZero的论文《Mastering Chess and Shogi by Self-Play with a General Reinforcement Learning Algorithm》中提到:
We trained a separate instance of AlphaZero for each game. Training proceeded for 700,000 steps (mini-batches of size 4,096) starting from randomly initialised parameters, using 5,000 first-generation TPUs (15) to generate self-play games and 64 second-generation TPUs to train the neural networks.
可以看到自我对弈数据及训练对计算资源的巨大需求,因此将棋盘改为9x9,并且极大简化了网络结构。
2.4.2 展望
- 可以利用更大规模算力将棋盘扩展为 15x15 并且实现 loss 收敛。
- 使用 GPU 实现模型的 MCTS 评估
实验总结
通过两个阶段的开发,对比了符号主义(基于规则搜索)与连接主义(基于神经网络)在五子棋博弈中的应用。
虽然基于 Alpha-Beta 剪枝的传统算法在实现难度和计算成本上较低,适合解决小规模或规则明确的简单问题;但基于 AlphaZero 的深度强化学习方法在足够算力下,处理复杂状态空间、实现通用智能方面具有优势。
参考
林知道 讲明白Minimax算法和α-β剪枝 图解 伪代码 - 知乎
《Mastering Chess and Shogi by Self-Play with a General Reinforcement Learning Algorithm》